Before we answer the above question, it is good to know how we have thought about the development of the anticollision system. Competing rail systems often take a solution developed for cars and try to adapt it to trams. However, our developers have developed a system specifically geared towards tram traffic!
The key advantage is that we work in a closed infrastructure environment in rail transport. This opens up an opportunity that is very difficult for the automotive industry. That opportunity is the ability to map routes and to maintain and update the maps regularly. To clarify – these are so-called HD maps, which are essentially a virtual model of the route. Moreover, the total track length for trams is several times smaller than the total number of kilometres of routes. The first major advantage of LiDAR, therefore, is the ability to create HD maps. Currently, there is no RADAR with the same functionality available in series.
It is true that competitors who use RADAR in combination with a camera can drive straight off without mapping, because they use the camera image to identify where the vehicle is. However, this approach has its weaknesses. It may not work correctly in many cases.
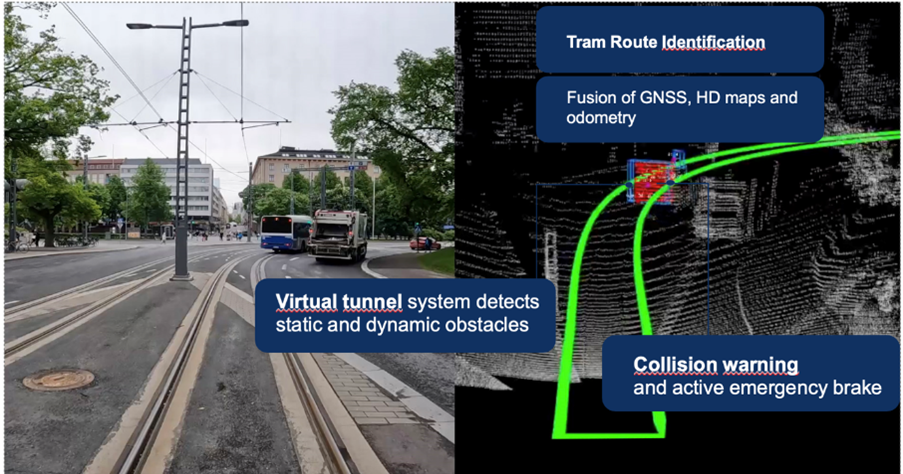
This is for example when the tracks are obscured by snow or leaves, when moving from a light environment to a dark one or due to water droplet reflections. In all these situations, the visibility of the tracks is lost and the functionality of the system is impaired. Our combination of sensors primarily uses information from odometry, GNSS and HD maps so that the system knows exactly where it is, and this ensures that system functionality is not degraded.